
Equipped with three centrically arranged gripper fingers, RÖHM centric grippers are optimally suited for universal and self-centering gripping of round workpieces. Especially on robots or portals, the 3-jaw centric grippers prevail with their compact design, low dead weight and high gripping force
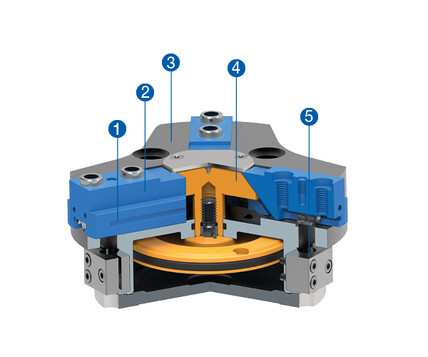
1: Lubrication pockets in the jaws for optimal grease distribution and high availability
2: Highest precision and service life from base jaws in proven T-slot guide
3: Body made of high-strength, hard-coated aluminum alloy
4: Wedge-hook principle with pneumatic actuation for high force and torque absorption
5: Position sensing possible by means of inductive and magnetic sensors

